





自制手持藍牙電話機器人自制手持藍牙電話機器人教程

本文目錄導(dǎo)讀:
隨著科技的不斷發(fā)展,機器人已經(jīng)逐漸走進了我們的生活,電話機器人作為一種智能化的通訊工具,受到了越來越多人的關(guān)注,本文將介紹如何自制一款手持藍牙電話機器人,幫助你更好地了解機器人的制作過程和原理。
所需材料和工具
在開始制作之前,我們需要準(zhǔn)備以下材料和工具:
1、樹莓派:一款基于 ARM 的微型電腦,性能強大,價格便宜,非常適合用于制作機器人。
2、藍牙模塊:用于實現(xiàn)機器人與手機之間的藍牙通信。
3、揚聲器和麥克風(fēng):用于實現(xiàn)機器人的語音功能。
4、LCD 顯示屏:用于顯示機器人的狀態(tài)和信息。
5、電源模塊:為機器人提供穩(wěn)定的電源。
6、外殼:用于保護機器人的內(nèi)部元件。
7、螺絲刀、電烙鐵、電線等工具:用于組裝機器人。
硬件連接
1、將樹莓派插入外殼中,并連接好電源。
2、將藍牙模塊插入樹莓派的 GPIO 接口上。
3、將揚聲器和麥克風(fēng)連接到樹莓派的音頻接口上。
4、將 LCD 顯示屏連接到樹莓派的 GPIO 接口上。

軟件安裝
1、下載并安裝 Raspbian 操作系統(tǒng)。
2、打開終端,輸入以下命令安裝所需的軟件包:
sudo apt-get update sudo apt-get install git build-essential python-dev python-pip python-smbus python-rpi.gpio python-pygame
3、下載并安裝語音識別庫:
git clone https://github.com/UbuntuForums/raspberry-pi-speech-recognition.git cd raspberry-pi-speech-recognition sudo python setup.py install
4、下載并安裝藍牙庫:
git clone https://github.com/adafruit/Adafruit_Python_Bluetooth.git cd Adafruit_Python_Bluetooth sudo python setup.py install
編寫代碼
1、創(chuàng)建一個 Python 腳本,用于實現(xiàn)機器人的基本功能,以下是一個簡單的示例代碼:
import RPi.GPIO as GPIO
import bluetooth
import speech_recognition as sr
import time
定義藍牙服務(wù) UUID
UUID = "00001101-0000-1000-8000-00805F9B34FB"
定義語音識別模型
model = "vosk-model-small-en"
定義語音識別語言
language = "en"
定義藍牙設(shè)備地址
device_address = "XX:XX:XX:XX:XX:XX"
定義藍牙服務(wù)端口
service_port = 1
定義藍牙連接狀態(tài)
connected = False
定義語音識別狀態(tài)
recognizing = False
定義語音識別結(jié)果
recognition_result = ""
定義語音識別回調(diào)函數(shù)
def on_phrase(phrase):
global recognition_result
recognition_result = phrase
定義藍牙連接回調(diào)函數(shù)
def on_connect(device, address, rssi):
global connected
connected = True
print("Connected to %s (%s)" % (address, bluetooth.lookup_name(address)))
定義藍牙斷開回調(diào)函數(shù)
def on_disconnect(device, address):
global connected
connected = False
print("Disconnected from %s" % address)
定義語音識別回調(diào)函數(shù)
def on_recognized(recognizer, result):
global recognition_result
recognition_result = result
定義語音識別結(jié)束回調(diào)函數(shù)
def on_ended(recognizer):
global recognizing
recognizing = False
定義語音識別錯誤回調(diào)函數(shù)
def on_error(recognizer, exception):
global recognizing
recognizing = False
print("Error: %s" % exception)
定義語音識別取消回調(diào)函數(shù)
def on_cancel(recognizer):
global recognizing
recognizing = False
print("Canceled")
定義語音識別超時回調(diào)函數(shù)
def on_timeout(recognizer):
global recognizing
recognizing = False
print("Timeout")
定義語音識別暫停回調(diào)函數(shù)
def on_pause(recognizer, pause_time):
global recognizing
recognizing = False
print("Paused: %s" % pause_time)
定義語音識別恢復(fù)回調(diào)函數(shù)
def on_resume(recognizer):
global recognizing
recognizing = True
print("Resume")
初始化語音識別
r = sr.Recognizer()
初始化藍牙
server_sock = bluetooth.BluetoothSocket(bluetooth.RFCOMM)
server_sock.connect((device_address, service_port))
注冊語音識別回調(diào)函數(shù)
r.phrase_callback = on_phrase
r.add_grammar(sr.RecognitionGrammar([("hello", 1.0)]))
啟動語音識別
try:
with sr.Microphone() as source:
print("Listening...")
while True:
recognizing = True
r.listen_in_background(server_sock, on_recognized)
while recognizing:
time.sleep(0.1)
recognition_result = r.recognize_google(phrase, language=language)
print("You said: %s" % recognition_result)
except sr.UnknownValueError:
print("Sorry, I can't understand.")
except sr.RequestError as e:
print("Sorry, could not request results; {0}".format(e))
關(guān)閉語音識別
r.stop_listening()
關(guān)閉藍牙
server_sock.close()2、將代碼保存為一個 Python 腳本,并運行它。
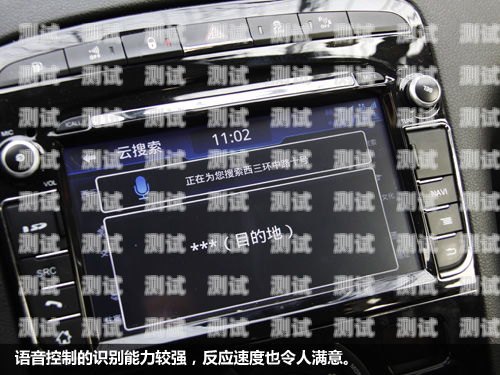
3、機器人將開始監(jiān)聽藍牙設(shè)備的語音指令,并通過語音識別技術(shù)將語音指令轉(zhuǎn)換為文本。
4、機器人將根據(jù)文本指令執(zhí)行相應(yīng)的操作,例如播放音樂、查詢天氣、發(fā)送短信等。
測試和優(yōu)化
1、測試機器人的基本功能,確保它能夠正確地連接到藍牙設(shè)備,并識別語音指令。
2、優(yōu)化機器人的語音識別算法,提高識別準(zhǔn)確率。

3、優(yōu)化機器人的語音播放功能,確保語音播放清晰、流暢。
4、優(yōu)化機器人的操作邏輯,確保它能夠根據(jù)用戶的指令執(zhí)行正確的操作。
通過以上步驟,我們成功地自制了一款手持藍牙電話機器人,這款機器人具有語音識別、藍牙通信、LCD 顯示屏等功能,可以幫助我們更好地與手機進行交互,這只是一個簡單的示例,你可以根據(jù)自己的需求和興趣對機器人進行進一步的開發(fā)和優(yōu)化,希望本文對你有所幫助,祝你制作成功!
在科技日新月異的時代,我們身邊充滿了各種智能設(shè)備,手持藍牙電話機器人就是近年來備受矚目的科技產(chǎn)品之一,本文將詳細介紹如何自制手持藍牙電話機器人,并探討其在實際生活中的應(yīng)用和意義。
手持藍牙電話機器人的概念及背景
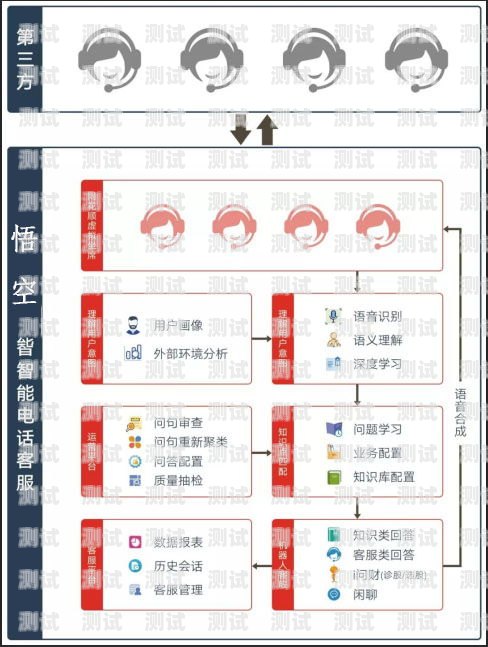
手持藍牙電話機器人是一種集成了藍牙技術(shù)、語音識別與合成技術(shù)、人工智能等先進技術(shù)的智能設(shè)備,隨著科技的不斷發(fā)展,人們對于通信設(shè)備的需求也在不斷升級,手持藍牙電話機器人應(yīng)運而生,成為了現(xiàn)代通信領(lǐng)域的一顆璀璨明星。
自制手持藍牙電話機器人的步驟
1、確定設(shè)計需求:在開始制作之前,首先要明確手持藍牙電話機器人的功能需求,如通話功能、語音識別與合成、智能助手等。
2、硬件選擇與準(zhǔn)備:根據(jù)設(shè)計需求,選擇合適的硬件設(shè)備,如藍牙模塊、麥克風(fēng)、揚聲器、處理器等,還需要準(zhǔn)備相關(guān)的電路板、電池等配件。
3、電路設(shè)計與搭建:根據(jù)選定的硬件設(shè)備,設(shè)計合理的電路圖,并將電路元件焊接到電路板上,這一步需要一定的電子基礎(chǔ)知識。
4、軟件編程與開發(fā):根據(jù)功能需求,編寫相應(yīng)的程序代碼,實現(xiàn)藍牙通信、語音識別與合成、智能助手等功能,這一步需要一定的編程技能。

5、組裝與測試:將焊接好的電路板、麥克風(fēng)、揚聲器等部件組裝到一起,進行功能測試,確保各項功能正常運行。
6、外觀設(shè)計與優(yōu)化:根據(jù)個人喜好,對手持藍牙電話機器人進行外觀設(shè)計和優(yōu)化,使其更加美觀大方。
手持藍牙電話機器人的應(yīng)用場景
1、商務(wù)辦公:手持藍牙電話機器人可以作為移動辦公的得力助手,實現(xiàn)語音通話、會議安排、日程提醒等功能,提高工作效率。
2、家庭生活:在家庭生活中,手持藍牙電話機器人可以充當(dāng)智能家居的控制中心,通過語音指令控制家電設(shè)備,提高生活品質(zhì)。
3、公共服務(wù):在公共場所,如醫(yī)院、銀行等,手持藍牙電話機器人可以提供語音導(dǎo)航、信息查詢等服務(wù),方便市民獲取所需信息。
手持藍牙電話機器人的意義
自制手持藍牙電話機器人不僅是一種科技愛好者的挑戰(zhàn)和嘗試,更是一種科技與生活的完美結(jié)合,它為我們的生活帶來了諸多便利和樂趣,讓我們在享受科技帶來的便捷的同時,也感受到了科技的力量和魅力,手持藍牙電話機器人的應(yīng)用場景非常廣泛,可以滿足不同領(lǐng)域的需求,推動相關(guān)產(chǎn)業(yè)的發(fā)展和進步。
自制手持藍牙電話機器人是一項充滿挑戰(zhàn)和樂趣的科技活動,通過不斷的嘗試和創(chuàng)新,我們可以將先進的科技技術(shù)與生活需求相結(jié)合,創(chuàng)造出更多實用、便捷的智能設(shè)備,隨著科技的不斷發(fā)展,手持藍牙電話機器人將會在更多領(lǐng)域得到應(yīng)用和推廣,為我們的生活帶來更多的便利和樂趣,我們也需要不斷學(xué)習(xí)和探索新的科技知識,以應(yīng)對未來科技發(fā)展的挑戰(zhàn)和機遇。
也許您對下面的內(nèi)容還感興趣:



給您推薦相同類型的內(nèi)容:
-

常德市電話機器人公司招聘,開啟智能時代的新機遇常德市電話機器人公司招聘信息
本文目錄導(dǎo)讀:公司概況招聘崗位福利待遇聯(lián)系方式在當(dāng)今科技飛速發(fā)展的時代,人工智能正以前所未有的速度改變著各個行業(yè),電話機器人作為人工智能的一個重要應(yīng)用領(lǐng)域,正逐漸成為企業(yè)提高效率、降低成本、提升客戶服務(wù)質(zhì)... -

湖北省AI電話機器人廠家,創(chuàng)新驅(qū)動,引領(lǐng)智能客服新時代湖北省ai電話機器人廠家有哪些
本文目錄導(dǎo)讀:湖北省AI電話機器人廠家的發(fā)展背景湖北省AI電話機器人廠家的技術(shù)優(yōu)勢湖北省AI電話機器人廠家的產(chǎn)品特點湖北省AI電話機器人廠家的應(yīng)用案例湖北省AI電話機器人廠家的發(fā)展前景在當(dāng)今數(shù)字化快速發(fā)展... -

探尋臨沂市電話機器人廠家地址,科技引領(lǐng)下的智能通信新勢力臨沂市電話機器人廠家地址在哪里
在當(dāng)今數(shù)字化快速發(fā)展的時代,電話機器人作為智能通信領(lǐng)域的一項重要創(chuàng)新成果,正逐漸改變著企業(yè)的溝通和運營模式,臨沂市,這座充滿活力與創(chuàng)新精神的城市,也孕育出了眾多電話機器人廠家,這些廠家都分布在哪里呢?讓我... -

創(chuàng)飛電話機器人說明書創(chuàng)飛電話機器人說明書下載
本文目錄導(dǎo)讀:產(chǎn)品概述功能特點使用方法注意事項在當(dāng)今數(shù)字化快速發(fā)展的時代,企業(yè)對于高效溝通和客戶服務(wù)的需求日益增長,創(chuàng)飛電話機器人應(yīng)運而生,它以先進的技術(shù)和智能化的功能,為企業(yè)提供了一種全新的溝通解決方案... -

接電話機器人怎么用視頻接電話機器人怎么用視頻教程
本文目錄導(dǎo)讀:接電話機器人的概述接電話機器人的使用場景接電話機器人的使用方法視頻教程視頻教程的優(yōu)勢注意事項在當(dāng)今數(shù)字化飛速發(fā)展的時代,企業(yè)和個人都在不斷尋求提高效率、降低成本的方法,接電話機器人作為一種創(chuàng)...